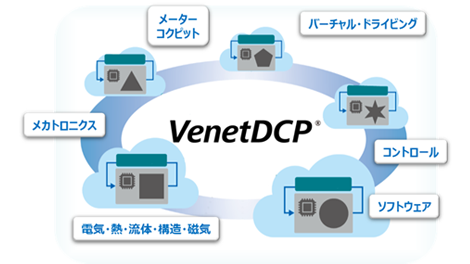
企画⇒実験⇒設計⇒適合の様々なシーンで、異なる部署・企業間をつなぐ共同検証ソリューション
VenetDCPは、自動車メーカーやサプライヤーで普及が進んでいるモデルベース開発をより広く大規模に適用するために、多くのモデル、異なる開発ツール、異なる部署・企業間をサイバー空間で結びつけ、共同検証できる環境を提供します
連成シミュレーションの場合
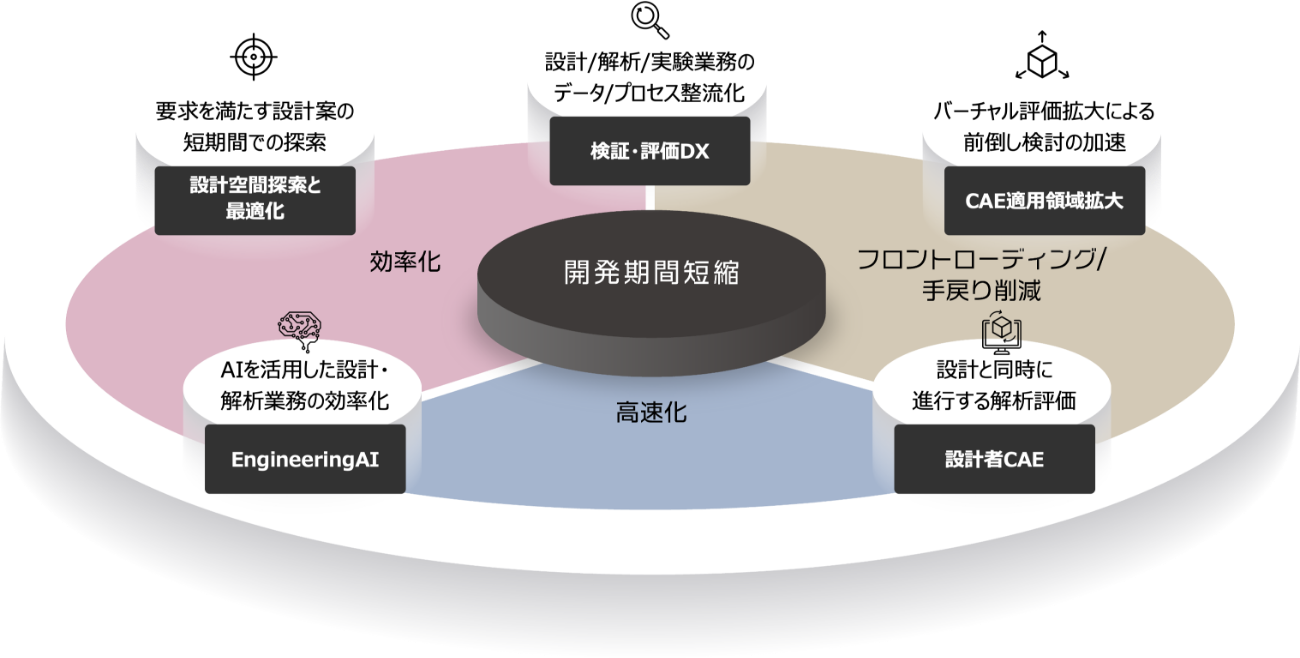
分散・連成シミュレーションによる効果
自動車業界
航空宇宙業界
電機業界
モデルの集約が不要
通信仕様でモデルを接続
分散により⼤規模シミュレーションに対応
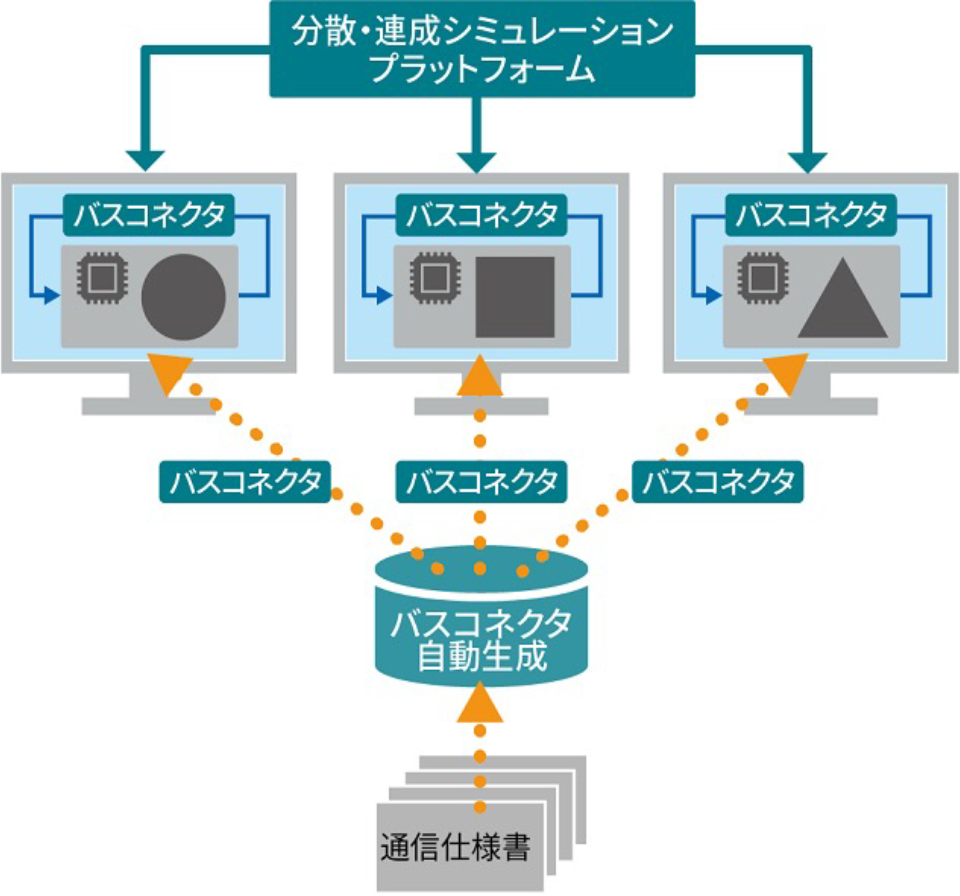
バスコネクタを使ったモデル間接続 画像提供元:株式会社東芝
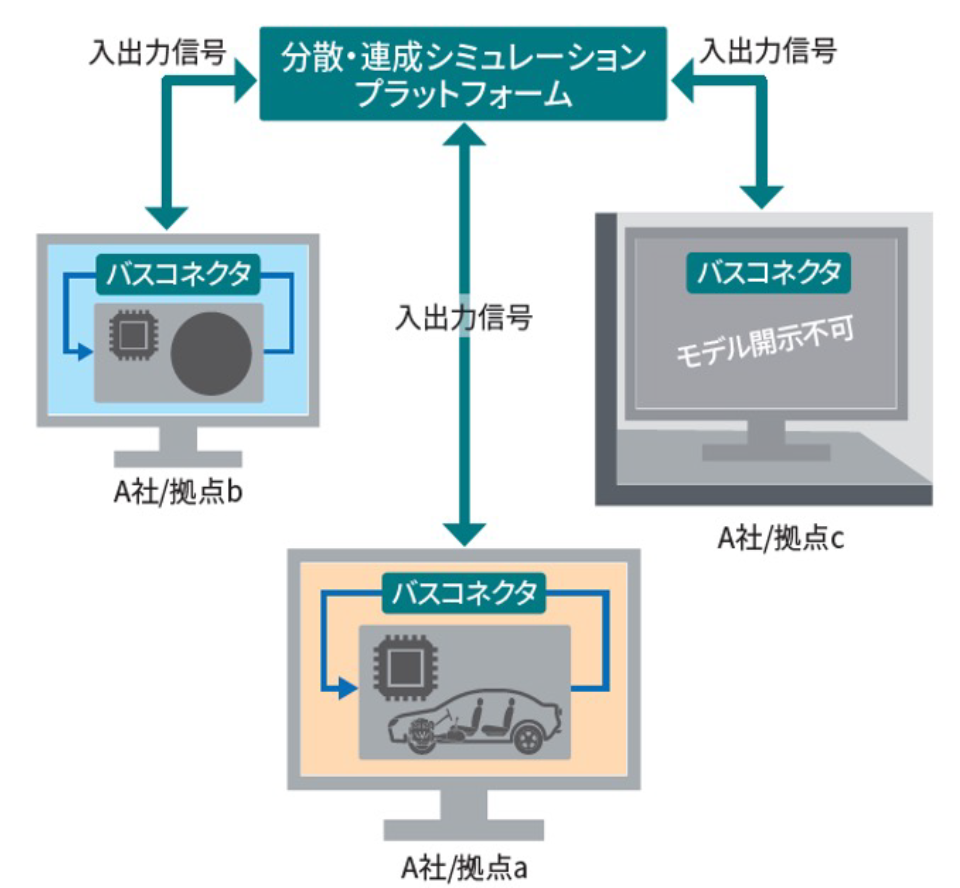
モデルを秘匿化した会社間の検証 画像提供元:株式会社東芝
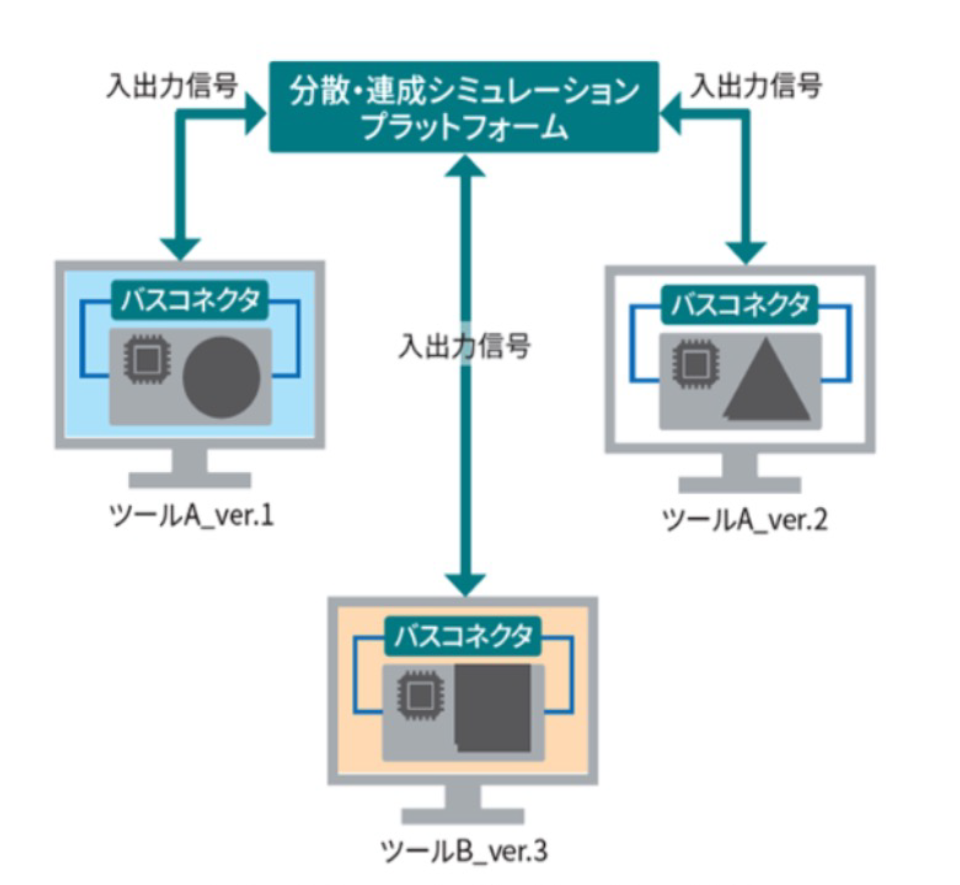
ツールやバージョンに依存しない検証環境 画像提供元:株式会社東芝
バスコネクタを用いることで、モデル間を入出力信号のみで連携するため、異なるシミュレータ、バージョン間での検証が可能です。
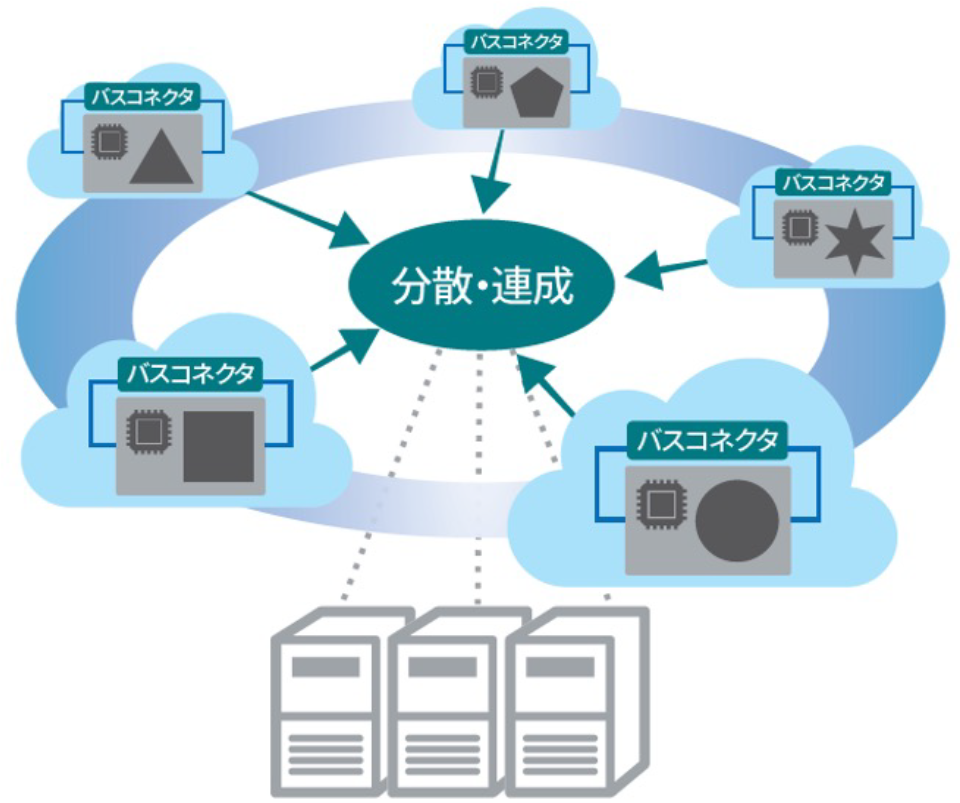
分散・連成シミュレーションの高速化 画像提供元:株式会社東芝
1つのモデルを並列可能な複数のモデルに分割することで、実行処理の並列化を行いシミュレーションの時間短縮を実現します。
クラウドやHPCでの高速なシミュレーション環境を短期間で構築し、さらなる高速化も可能です。
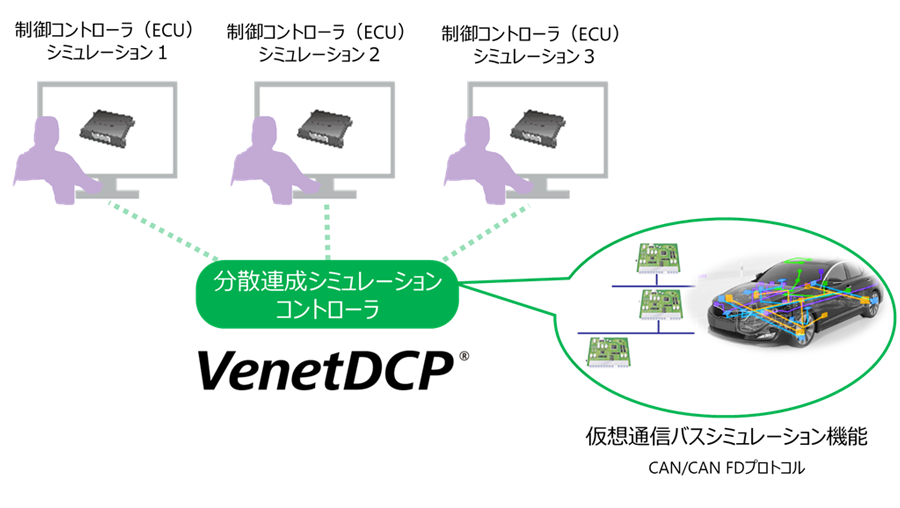
仮想通信バスシミュレーション機能 画像提供元:株式会社東芝
分散・連成シミュレーション実行時に、車載ネットワークを用いる場合と同じ、CAN/CAN-FDプロトコルのリアルな信号遅延・輻輳・通信異常の再現模擬が可能です。
VenetDCPは株式会社東芝の日本における登録商標または商標です。
お客様のご要望をお聞かせください。
課題解決しうる製品を提案させて頂き、ご導入までのフローをお話させて頂きます。
実際に製品をご体感頂き、使用感や効果算出のご確認のお手伝いをさせて頂きます。
年間サブスクリプションでのご提供となります。詳細はお問合せください。
VenetDCPは、MATLAB SimulinkのS-Function形式や、FMI規格をサポートする国内外の100以上のツールと接続が可能です。